

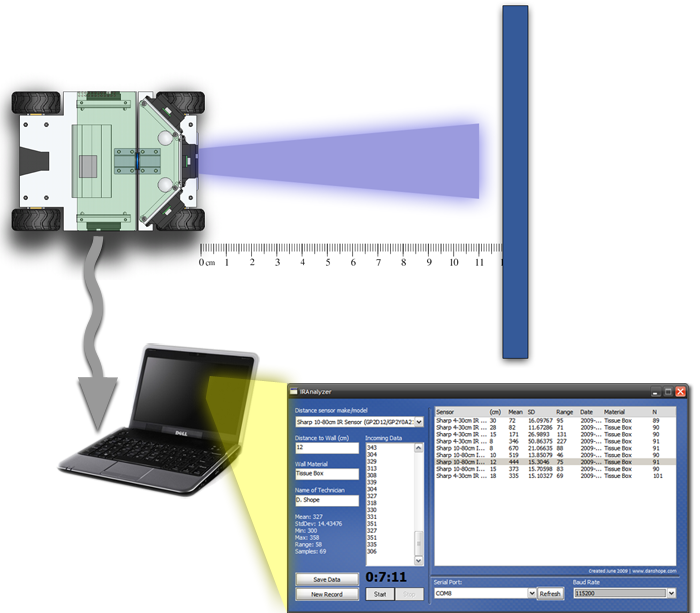
In a typical usage scenario the sensor is installed on a robot or fixed in place while connected to the computer. A ruler/tape measure is aligned with the sensor, and a wall or moveable object are placed in front of the sensor.
The ruler is used to preset the distance between the sensor and the object to be detected. Once everything is set up, fire up the robot's software and IRAnalyzer, and start logging!
The ruler is used to preset the distance between the sensor and the object to be detected. Once everything is set up, fire up the robot's software and IRAnalyzer, and start logging!